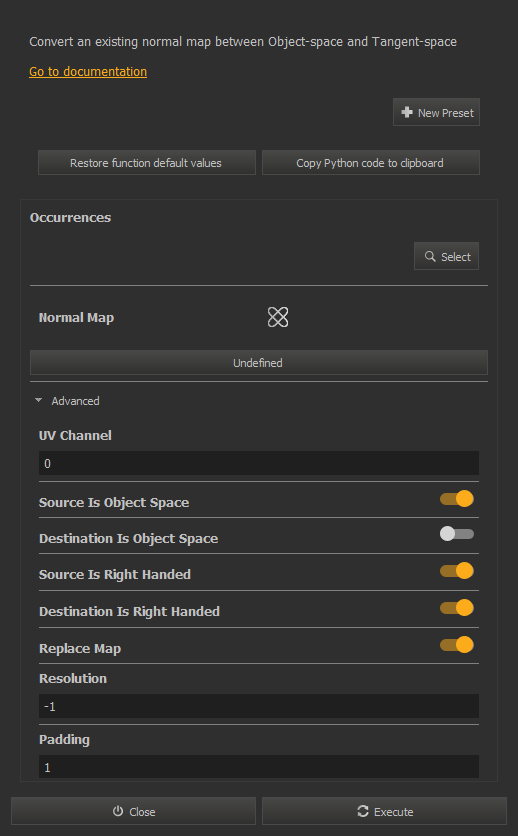
occurrences (OccurrenceList) : Occurrences of components using the given map normalMap (Image) : Source normal map to convert uvChannel (Int) [optional] : UV channel used on the given map sourceIsObjectSpace (Boolean) [optional] : If True, consider the given normalMap in Object-space representation, else Tangent-space destinationIsObjectSpace (Boolean) [optional] : If True, convert the given normalMap to Object-space representation, else Tangent-space sourceIsRightHanded (Boolean) [optional] : Considers source normal map as part of a right-handed coordinates system destinationIsRightHanded (Boolean) [optional] : Generate destination normal map as part of a right-handed coordinates system replaceMap (Boolean) [optional] : If true, the given normalMap will be replaced by the converted one resolution (Int) [optional] : New map resolution (if replaceMap=false), if resolution=-1, the input resolution will be used padding (Int) [optional] : Number of pixels to add for padding
Return value
convertedNormalMap (Image) : Converted normal map (equals normalMap if replaceMap=true)